Groove
2019
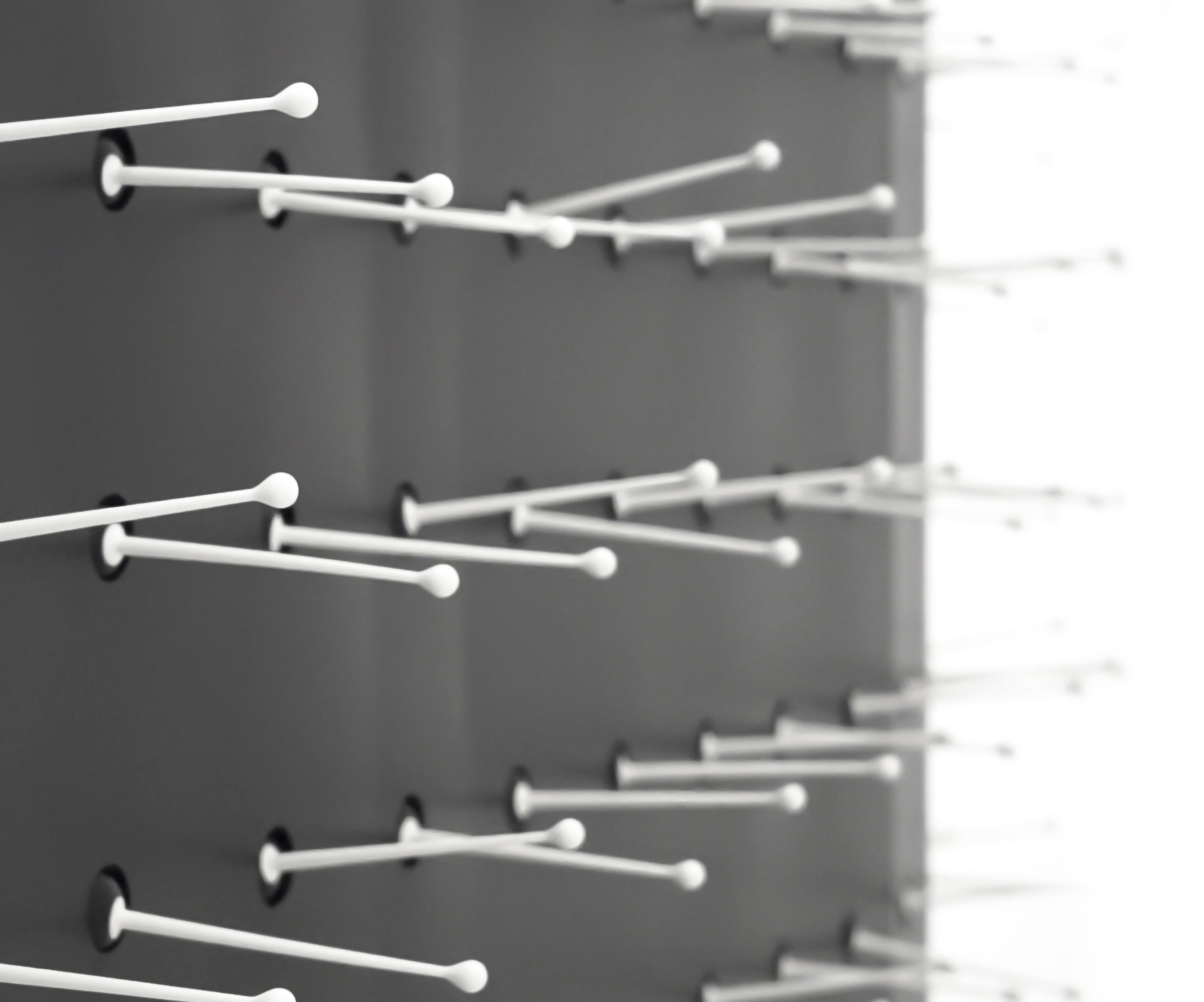
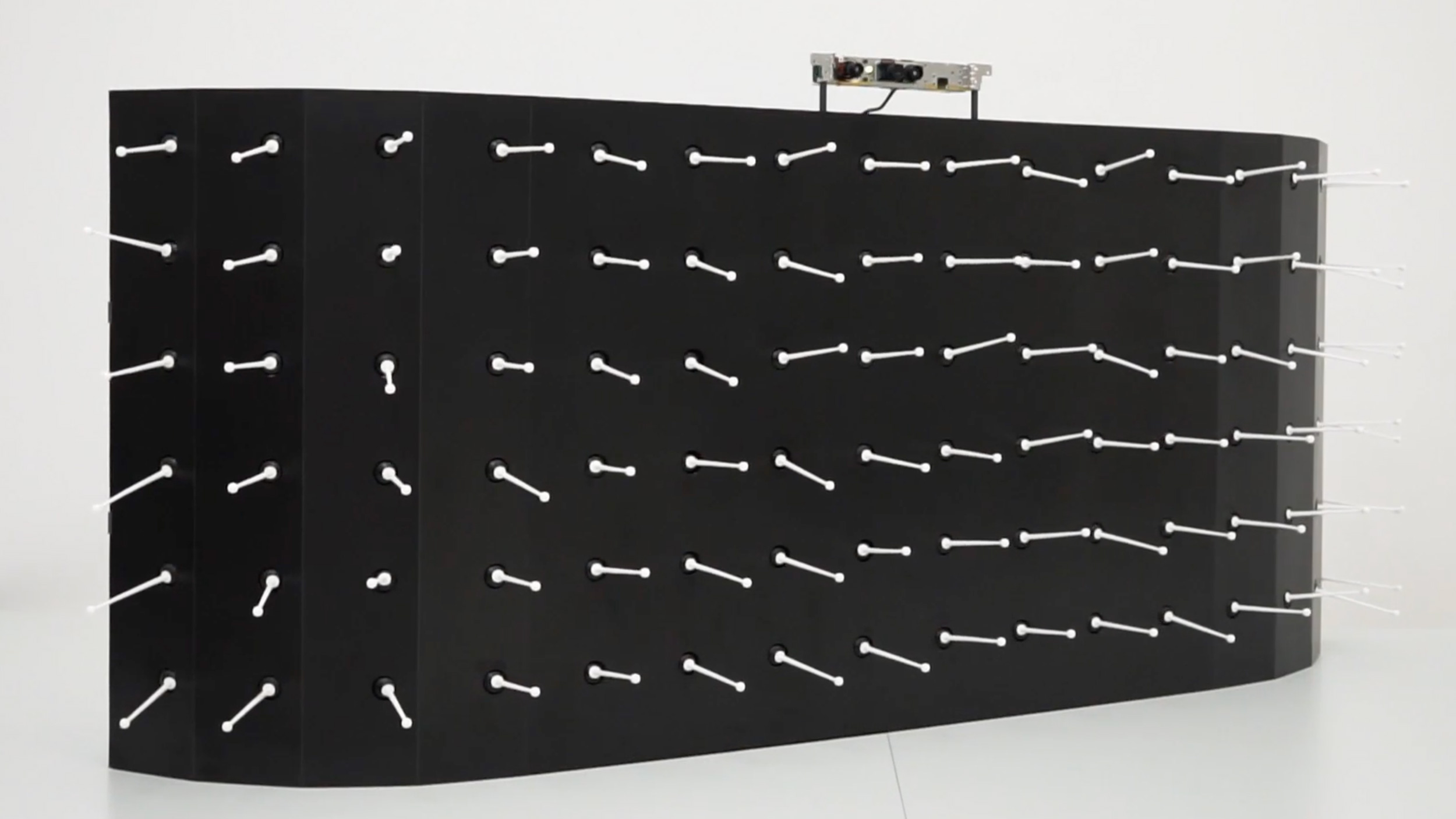
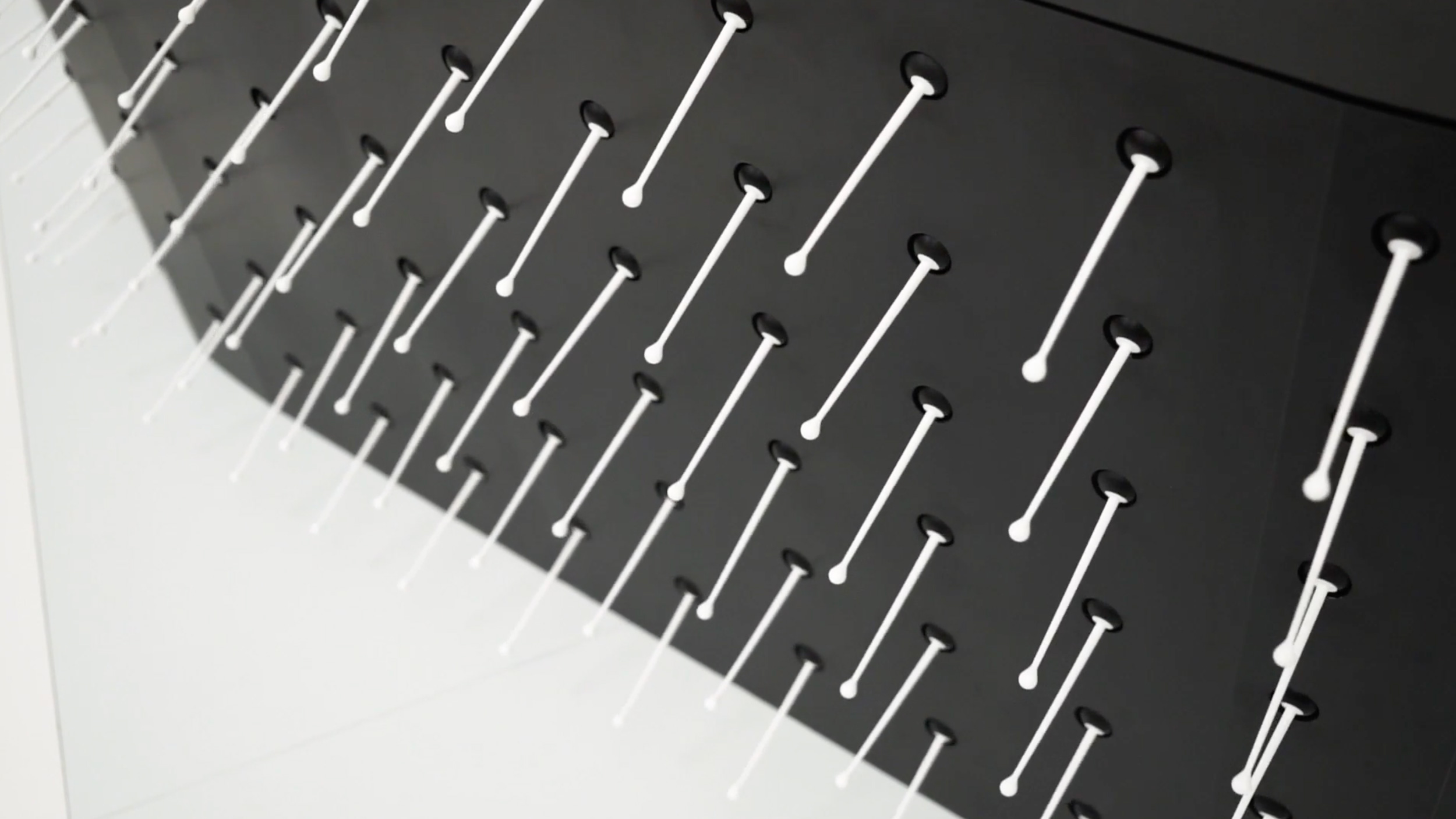
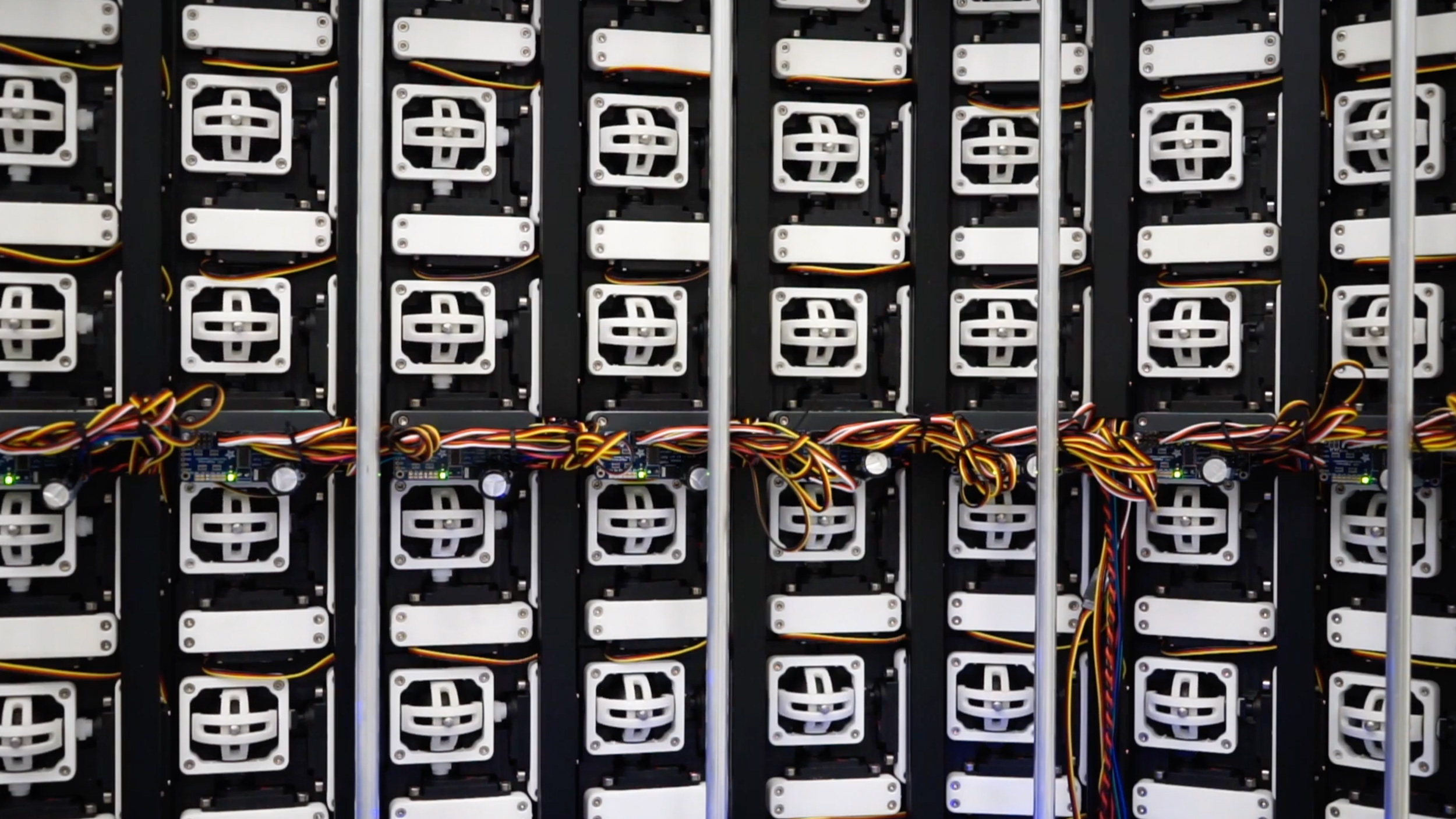
This research project for Daimler explored the power of physical motion to attract attention and convey information on a visceral level. By creating an animated surface that can react to events and user interactions, we explored the potential of equipping autonomous systems with an eloquent skin that enters into a dialog with its surroundings.


Autonomous machines are very nosy: they collect a lot of data of their environment without sharing what and why. Our hypothesis is that if we constantly share status and intent of the system we can build a shared understanding and trust allowing to coexist, interact and even collaborate. The need to display was translated into the mental model of a membrane and motion as the medium to communicate. Why? Motion stimuli directly appeal to our lizard brain: motion information is processed – without the detour of reasoning – even in the periphery of our field of vision. We created different motion patterns and explored the wealth of expressions and their semantic connotations.

more projects

Zephproduct

Cosmproduct
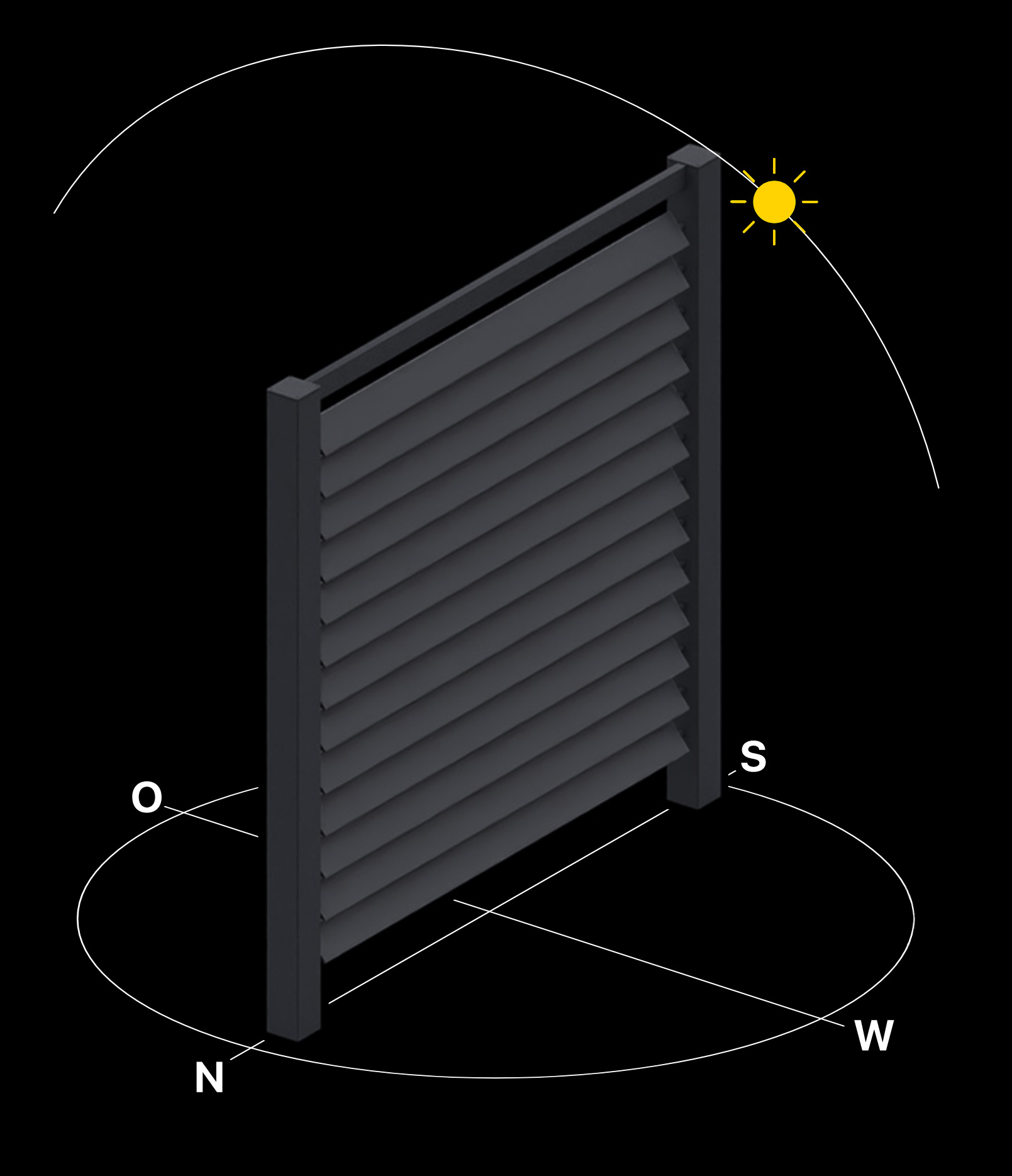
Power Shadesproduct
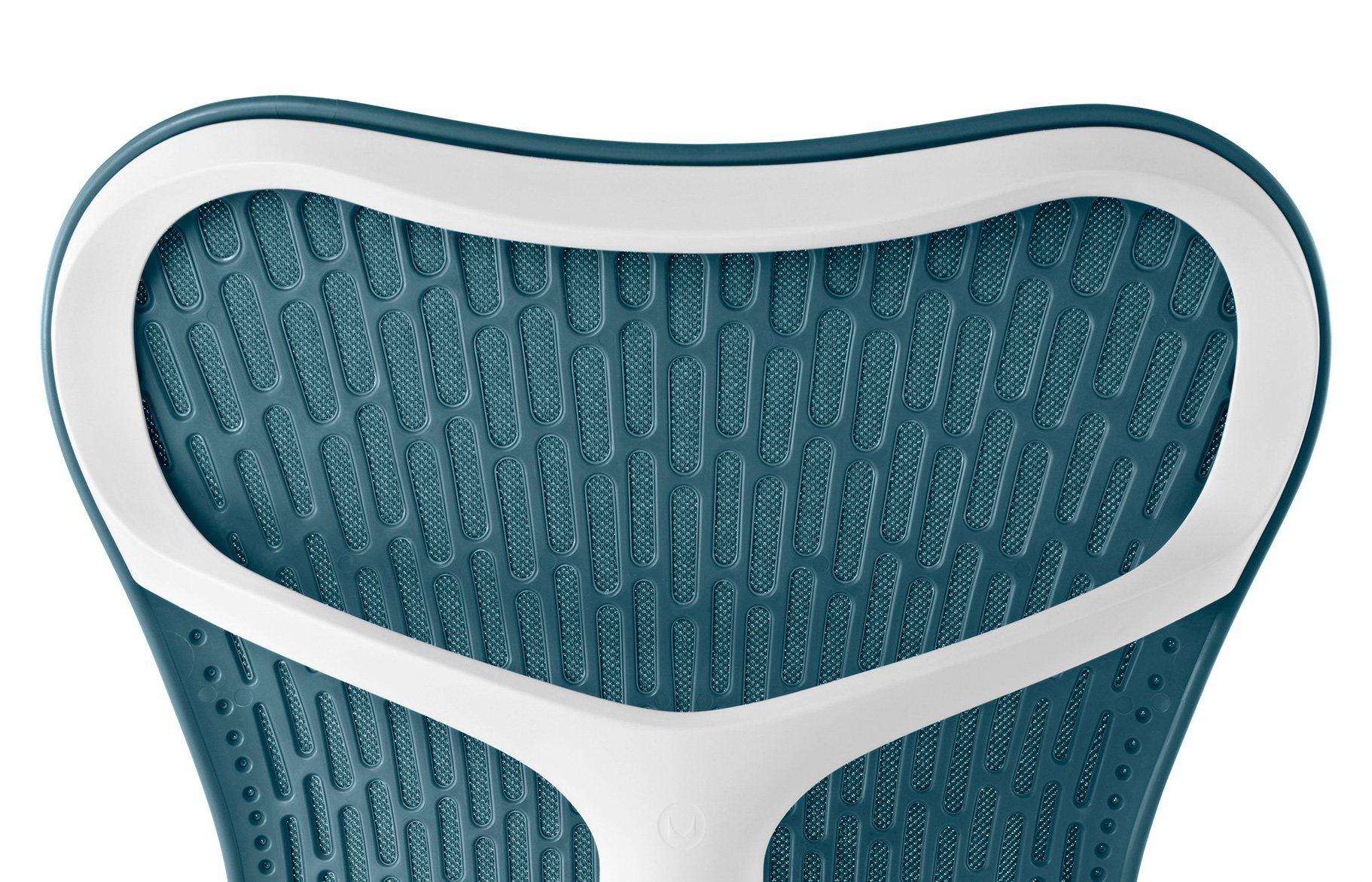
Mirraproduct

Metaform Portfoliosystem

Coiled Porcelain Vasesproduct

MetaformToolssystem

Setuproduct

Scooterproduct

Helix Topsproduct

Polygon Wire Tablesproduct

PowerPodsproduct
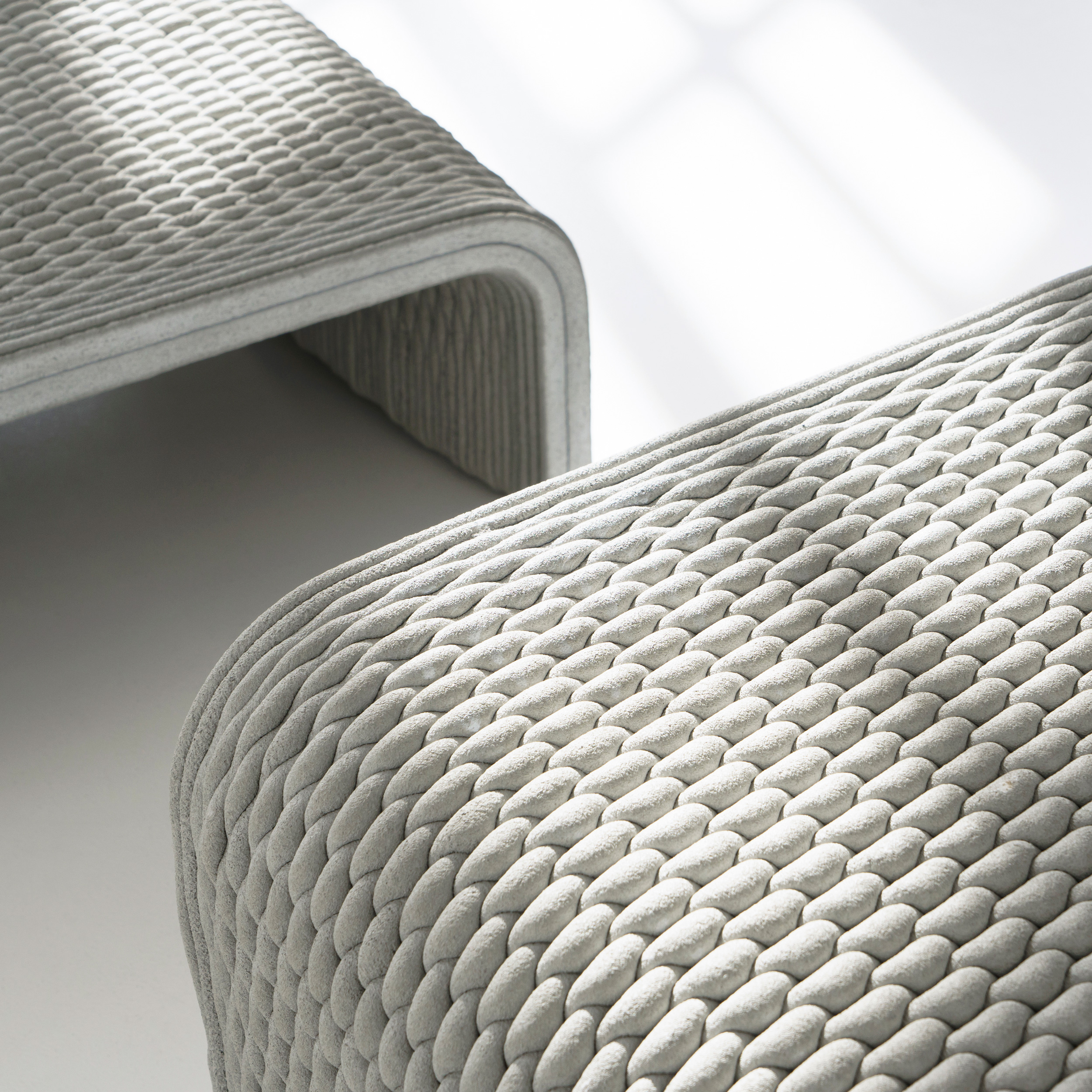
Woven Concrete Benchesproduct